The Routh array is a tabular method permitting one to establish the stability of a system using only the coefficients of the characteristic polynomial. Central to the field of control systems design, the Routh–Hurwitz theorem and Routh array emerge by using the Euclidean algorithm and Sturm's theorem in evaluating Cauchy indices.
The Cauchy index[edit]
Given the system:

Assuming no roots of  lie on the imaginary axis, and letting
lie on the imaginary axis, and letting
 = The number of roots of with negative real parts, and
= The number of roots of with negative real parts, and = The number of roots of with positive real parts
= The number of roots of with positive real parts
then we have

Expressing  in polar form, we have
in polar form, we have

where
![{\displaystyle \rho (x)={\sqrt {{\mathfrak {Re}}^{2}[f(x)]+{\mathfrak {Im}}^{2}[f(x)]}}\quad (5)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
and
![{\displaystyle \theta (x)=\tan ^{-1}{\big (}{\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]{\big )}\quad (6)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)
from (2) note that

where

Now if the ith root of has a positive real part, then (using the notation y=(RE[y],IM[y]))
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (-|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=\pi +\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {3\pi }{2}}\quad (9)\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
and
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (-|{\mathfrak {Re}}[r_{i}]|,0)=\pi -\tan ^{-1}0=\pi \quad (10)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
and
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (-|{\mathfrak {Re}}[r_{i}]|,\infty )=\pi -\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\quad (11)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
Similarly, if the ith root of has a negative real part,
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=0-\lim _{\phi \to \infty }\tan ^{1}\phi =-{\frac {\pi }{2}}\quad (12)\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb66015512b6985b691bd082240e95221662faa4)
and
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (|{\mathfrak {Re}}[r_{i}]|,0)=\tan ^{-1}0=0\,\quad (13)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
and
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (|{\mathfrak {Re}}[r_{i}]|,\infty )=\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\,\quad (14)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)
From (9) to (11) we find that  when the ith root of has a positive real part, and from (12) to (14) we find that
when the ith root of has a positive real part, and from (12) to (14) we find that  when the ith root of has a negative real part. Thus,
when the ith root of has a negative real part. Thus,

So, if we define

then we have the relationship

and combining (3) and (17) gives us
 and
and 
Therefore, given an equation of of degree  we need only evaluate this function
we need only evaluate this function  to determine , the number of roots with negative real parts and , the number of roots with positive real parts.
to determine , the number of roots with negative real parts and , the number of roots with positive real parts.

|
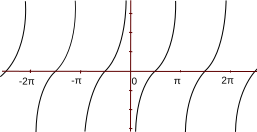
Figure 1
|
 versus  |
In accordance with (6) and Figure 1, the graph of vs , varying  over an interval (a,b) where
over an interval (a,b) where  and
and  are integer multiples of
are integer multiples of  , this variation causing the function
, this variation causing the function  to have increased by , indicates that in the course of travelling from point a to point b, has "jumped" from
to have increased by , indicates that in the course of travelling from point a to point b, has "jumped" from  to
to  one more time than it has jumped from to . Similarly, if we vary over an interval (a,b) this variation causing to have decreased by , where again is a multiple of at both
one more time than it has jumped from to . Similarly, if we vary over an interval (a,b) this variation causing to have decreased by , where again is a multiple of at both  and
and  , implies that
, implies that ![{\displaystyle \tan \theta (x)={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f) has jumped from to one more time than it has jumped from to as was varied over the said interval.
has jumped from to one more time than it has jumped from to as was varied over the said interval.
Thus,  is times the difference between the number of points at which
is times the difference between the number of points at which ![{\displaystyle {\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c) jumps from to and the number of points at which jumps from to as ranges over the interval
jumps from to and the number of points at which jumps from to as ranges over the interval  provided that at
provided that at  ,
, ![{\displaystyle \tan[\theta (x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef) is defined.
is defined.
|
Figure 2
|
 versus |
In the case where the starting point is on an incongruity (i.e.  , i = 0, 1, 2, ...) the ending point will be on an incongruity as well, by equation (17) (since is an integer and is an integer, will be an integer). In this case, we can achieve this same index (difference in positive and negative jumps) by shifting the axes of the tangent function by
, i = 0, 1, 2, ...) the ending point will be on an incongruity as well, by equation (17) (since is an integer and is an integer, will be an integer). In this case, we can achieve this same index (difference in positive and negative jumps) by shifting the axes of the tangent function by  , through adding to . Thus, our index is now fully defined for any combination of coefficients in by evaluating
, through adding to . Thus, our index is now fully defined for any combination of coefficients in by evaluating ![{\displaystyle \tan[\theta ]={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8) over the interval (a,b) =
over the interval (a,b) =  when our starting (and thus ending) point is not an incongruity, and by evaluating
when our starting (and thus ending) point is not an incongruity, and by evaluating
![{\displaystyle \tan[\theta '(x)]=\tan[\theta +\pi /2]=-\cot[\theta (x)]=-{\mathfrak {Re}}[f(x)]/{\mathfrak {Im}}[f(x)]\quad (19)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)
over said interval when our starting point is at an incongruity.
This difference, , of negative and positive jumping incongruities encountered while traversing from  to
to  is called the Cauchy Index of the tangent of the phase angle, the phase angle being or
is called the Cauchy Index of the tangent of the phase angle, the phase angle being or  , depending as
, depending as  is an integer multiple of or not.
is an integer multiple of or not.
The Routh criterion[edit]
To derive Routh's criterion, first we'll use a different notation to differentiate between the even and odd terms of :

Now we have:

Therefore, if is even,
![{\displaystyle {\begin{aligned}f(j\omega )&=(-1)^{n/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (23)\\&+j(-1)^{(n/2)-1}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e495902015ba0b7f57501e6d3d82ee9ab5ef62a)
and if is odd:
![{\displaystyle {\begin{aligned}f(j\omega )&=j(-1)^{(n-1)/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (24)\\&+(-1)^{(n-1)/2}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2031e504dd4c89445e158080035a39a2e0e17c2b)
Now observe that if is an odd integer, then by (3)  is odd. If is an odd integer, then
is odd. If is an odd integer, then  is odd as well. Similarly, this same argument shows that when is even, will be even. Equation (15) shows that if is even, is an integer multiple of . Therefore, is defined for even, and is thus the proper index to use when n is even, and similarly
is odd as well. Similarly, this same argument shows that when is even, will be even. Equation (15) shows that if is even, is an integer multiple of . Therefore, is defined for even, and is thus the proper index to use when n is even, and similarly  is defined for odd, making it the proper index in this latter case.
is defined for odd, making it the proper index in this latter case.
Thus, from (6) and (23), for even:
![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {-{\mathfrak {Im}}[f(x)]}{{\mathfrak {Re}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\cdots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (25)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9829781584a0ac5eac8c828f3b075583bb496da)
and from (19) and (24), for odd:
![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {{\mathfrak {Re}}[f(x)]}{{\mathfrak {Im}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\ldots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (26)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d8786a9be2f8a0f8cff61b436453fa922966c5d)
Lo and behold we are evaluating the same Cauchy index for both:

Sturm's theorem[edit]
Sturm gives us a method for evaluating  . His theorem states as follows:
. His theorem states as follows:
Given a sequence of polynomials  where:
where:
1) If  then
then  ,
,  , and
, and ![{\displaystyle \operatorname {sign} [f_{k-1}(x)]=-\operatorname {sign} [f_{k+1}(x)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a866748052776183bc0b2820b98b37558342d6a5)
2)  for
for 
and we define  as the number of changes of sign in the sequence for a fixed value of , then:
as the number of changes of sign in the sequence for a fixed value of , then:

A sequence satisfying these requirements is obtained using the Euclidean algorithm, which is as follows:
Starting with  and
and  , and denoting the remainder of
, and denoting the remainder of  by
by  and similarly denoting the remainder of
and similarly denoting the remainder of  by
by  , and so on, we obtain the relationships:
, and so on, we obtain the relationships:

or in general

where the last non-zero remainder,  will therefore be the highest common factor of
will therefore be the highest common factor of  . It can be observed that the sequence so constructed will satisfy the conditions of Sturm's theorem, and thus an algorithm for determining the stated index has been developed.
. It can be observed that the sequence so constructed will satisfy the conditions of Sturm's theorem, and thus an algorithm for determining the stated index has been developed.
It is in applying Sturm's theorem (28) to (29), through the use of the Euclidean algorithm above that the Routh matrix is formed.
We get

and identifying the coefficients of this remainder by  ,
,  ,
,  ,
,  , and so forth, makes our formed remainder
, and so forth, makes our formed remainder

where

Continuing with the Euclidean algorithm on these new coefficients gives us

where we again denote the coefficients of the remainder  by
by  ,
,  ,
,  ,
,  ,
making our formed remainder
,
making our formed remainder

and giving us

The rows of the Routh array are determined exactly by this algorithm when applied to the coefficients of (20). An observation worthy of note is that in the regular case the polynomials  and
and  have as the highest common factor
have as the highest common factor  and thus there will be polynomials in the chain .
and thus there will be polynomials in the chain .
Note now, that in determining the signs of the members of the sequence of polynomials that at  the dominating power of
the dominating power of  will be the first term of each of these polynomials, and thus only these coefficients corresponding to the highest powers of in
will be the first term of each of these polynomials, and thus only these coefficients corresponding to the highest powers of in  , and , which are
, and , which are  ,
,  , , , ... determine the signs of , , ..., at .
, , , ... determine the signs of , , ..., at .
So we get  that is,
that is,  is the number of changes of sign in the sequence
is the number of changes of sign in the sequence  ,
,  ,
,  , ... which is the number of sign changes in the sequence , , , , ... and
, ... which is the number of sign changes in the sequence , , , , ... and  ; that is
; that is  is the number of changes of sign in the sequence
is the number of changes of sign in the sequence  ,
,  ,
,  , ... which is the number of sign changes in the sequence ,
, ... which is the number of sign changes in the sequence ,  , ,
, ,  , ...
, ...
Since our chain , , , , ... will have members it is clear that  since within
since within  if going from to a sign change has not occurred, within
if going from to a sign change has not occurred, within
 going from to one has, and likewise for all transitions (there will be no terms equal to zero) giving us total sign changes.
going from to one has, and likewise for all transitions (there will be no terms equal to zero) giving us total sign changes.
As  and
and  , and from (18)
, and from (18)  , we have that
, we have that  and have derived Routh's theorem -
and have derived Routh's theorem -
The number of roots of a real polynomial  which lie in the right half plane
which lie in the right half plane  is equal to the number of changes of sign in the first column of the Routh scheme.
is equal to the number of changes of sign in the first column of the Routh scheme.
And for the stable case where  then
then  by which we have Routh's famous criterion:
by which we have Routh's famous criterion:
In order for all the roots of the polynomial to have negative real parts, it is necessary and sufficient that all of the elements in the first column of the Routh scheme be different from zero and of the same sign.
References[edit]
- Hurwitz, A., "On the Conditions under which an Equation has only Roots with Negative Real Parts", Rpt. in Selected Papers on Mathematical Trends in Control Theory, Ed. R. T. Ballman et al. New York: Dover 1964
- Routh, E. J., A Treatise on the Stability of a Given State of Motion. London: Macmillan, 1877. Rpt. in Stability of Motion, Ed. A. T. Fuller. London: Taylor & Francis, 1975
- Felix Gantmacher (J.L. Brenner translator) (1959) Applications of the Theory of Matrices, pp 177–80, New York: Interscience.

.jpg)
.svg)