
Marine navigation
This article needs additional citations for verification. (January 2023) |

Marine navigation is the art and science of steering a ship from a starting point (sailing) to a destination, efficiently and responsibly. It is an art because of the skill that the navigator must have to avoid the dangers of navigation, and it is a science because it is based on physical, mathematical, oceanographic, cartographic, astronomical, and other knowledge.
Marine navigation can be surface or submarine.
Etymology[edit]
Navigation (from the Latin word navigatio) is the act of sailing or voyaging. Nautical (from Latin nautĭca, and this from Greek ναυτική [τέχνη] nautikḗ [téjne] "[art of] sailing" and from ναύτης nautes "sailor") is that pertaining to navigation and the science and art of sailing. Naval (from the Latin adjective navalis) is that relating to ships and navigation, or particularly to the navy.[1]
In Ancient Rome, the navicularii conducted long-distance trade by sea.
History[edit]
Coastal navigation was practiced since the most ancient times.[2] The biblical account of the great flood, where the Noah's Ark appears, is based both on myths and on the navigational practice of the Mesopotamian civilizations, who from the Sumerians onwards navigated their two rivers (Tigris and Euphrates) and the Persian Gulf. The ancient Egyptians did not limit themselves to inland navigation of the Nile either, and used the Mediterranean sea routes existing since the Neolithic — through which cultural phenomena such as megalithism or the metallurgy would have spread for millennia. The Cretans even established a true thalassocracy (government of the seas, attributed to King Minos) until the Mycenaean period (2nd millennium BC), when the events mythologized in the Homeric poems[Note 1] ought to be placed.

The Hittites, led by King Šuppiluliuma II faced the Cyprus in the first historically recorded naval battle (ca. 1210 BC); at the same time, all the civilizations of the Eastern Mediterranean suffered from the incursions of the denominated "Sea Peoples".
The Phoenicians — whom the Greeks considered their masters in navigation and who are also cited in the Bible —[Note 2][3] would have been the first Mediterranean civilization to sail the high seas by sculling and sailing, guided by the sun during the day and by the North Star at night. It is recorded that, crossing the Strait of Gibraltar — the "Rock of Gibraltar", the so-called "Pillars of Hercules" in the Greek myths — they sailed across the Atlantic Ocean reaching the south to some point on the west coast of Africa and the north to the British Isles (or even beyond, to the place that the texts call Thule), but it is unclear if they circumnavigated Africa or crossed the Atlantic reaching America, something most likely achieved by the Norsemen in the 10th century.










.jpg)


.jpg)






.jpg)
-
 Remains of a 1st-century Gallo-Roman ship archaeologically named Arles Rhône 3.
Remains of a 1st-century Gallo-Roman ship archaeologically named Arles Rhône 3. -
 Roman ship depicted on a coin.
Roman ship depicted on a coin. -
 Relief of a 2nd-century sarcophagus representing a "gauloi", a trading ship.
Relief of a 2nd-century sarcophagus representing a "gauloi", a trading ship. -
 Model depicting a naval confrontation between a Roman ship and Omani ships in the Indian Ocean, 2nd century.
Model depicting a naval confrontation between a Roman ship and Omani ships in the Indian Ocean, 2nd century.
.jpg)



In the Indian and Pacific oceans, the oceanic navigations made it possible to populate all the archipelagoes (Polynesian navigation). However, the possibility of reaching South America is still a matter of debate — the settlement of the Americas through the Bering Strait would not have required navigation, or in any case, coastal navigation would have sufficed — as well as other possible pre-Columbian transoceanic contacts. In the first quarter of the 15th century, the Chinese expeditions led by Zheng He reached the African coasts of the Indian Ocean. It has been proposed that they might have reached the South Atlantic and even America and Europe, but this proposal has not been accepted beyond mere speculation.

Mediterranean navigation, which the Romans had come to control (undisputed Mare Nostrum since their victories over the Carthaginians in the Punic Wars [264-146 BC], the Egyptians during the Battle of Actium [31 BC], and pirates), was once again a contested environment in the Middle Ages, from the moment the Vandals managed to attack the Italian coasts from the sea. In the 6th century, the Byzantines managed to regain control, and in the 7th century it was the Arabs who ended up dividing the Mediterranean area,[5] which even the Vikings and Normans were able to access. Since the time of the Crusades, Venetian,[6] Genoese[7] and Crown of Aragon[8] navigators also had a strong presence. Knowledge of the compass, transmitted to the Europeans by the Arabs (who in turn had obtained it from the Chinese), together with other improvements in astronomical techniques (astrolabe, Jacob's staff, sextant, cartographic techniques (portulan and shipbuilding (caravel, nau, galleon), made the Age of Discovery — initially led by the Portuguese and Castilians — possible, especially after Henry the Navigator impulsed the school of Sagres. In 1492, the first voyage of Christopher Columbus took place. In 1488, Bartolomeu Dias rounded the Cape of Good Hope, which opened the route to the Indian Ocean — Vasco de Gama reached Calicut (India) in 1498. Between 1519 and 1521, the Magellan-Elcano expedition circumnavigated the world — measuring the geographical longitude with the method of its scientific organizer, Rui Faleiro. Until the 6th century, the Spanish-Portuguese hegemony in navigation was patent in fields such as geography and cosmography. Both English and French pilots learned to navigate from the texts of Pedro de Medina, Martín Fernández de Enciso and Martín Cortés, among others.[9][10] The conjunction of "cannons and sails" has been argued to have given European states the advantage to prevail over the rest,[11] launching the modern "world system".[12]
-
 Navigation of Columbus' four voyages to America, 1492–1504.
Navigation of Columbus' four voyages to America, 1492–1504. -
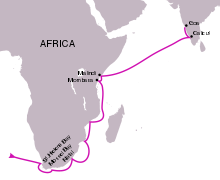 Navigation of Vasco de Gama first voyage, 1498.
Navigation of Vasco de Gama first voyage, 1498. -
 The Victoria, ship of the Magellan-Elcano expedition (1519-1521), in an illustration of a map by Abraham Ortelius, 1590.
The Victoria, ship of the Magellan-Elcano expedition (1519-1521), in an illustration of a map by Abraham Ortelius, 1590. -
 Model of the galley Real, flagship of the Christian navy in the Battle of Lepanto (1571).
Model of the galley Real, flagship of the Christian navy in the Battle of Lepanto (1571). -
 Dutch gueux de mer engage the Spanish at the battle of Haarlemmermeer, 1573; painting by Hendrick Cornelisz Vroom, ca. 1621.
Dutch gueux de mer engage the Spanish at the battle of Haarlemmermeer, 1573; painting by Hendrick Cornelisz Vroom, ca. 1621. -
 Francis Drake's fleet in front of Santo Domingo in 1585.
Francis Drake's fleet in front of Santo Domingo in 1585. -
 Navigation of the Spanish Armada, 1588.
Navigation of the Spanish Armada, 1588.









-
 Navigation of Henry Hudson in search of the Northeast Passage, 1607–1608.
Navigation of Henry Hudson in search of the Northeast Passage, 1607–1608. -
 Vasa, flagship of the Swedish navy, sunk on her maiden voyage, 1628.
Vasa, flagship of the Swedish navy, sunk on her maiden voyage, 1628. -

_(14778654772).jpg)


Since the 18th century, England exercised maritime hegemony, a fact that was confirmed in the early 19th century with the Battle of Trafalgar (1805). Among the main English expeditions of the time were Captain Cook's (1768-1779), also the second expedition of the Beagle (1831-1836) — which was of great importance for the later development of Charles Darwin's theory of evolution. Already fully in the age of steam navigation, techniques and vessels continued to be perfected in transoceanic sailing (clipper), that did not become obsolete for commercial navigation until the 20th century — especially after the opening of the Panama Canal. Even then, the unbridled optimism that characterized the naval design of the time suffered a severe blow with the sinking of the Titanic (1912).
-
 Medal used by the British navy to celebrate the capture of Cartagena de Indias, that did not take place (1741).
Medal used by the British navy to celebrate the capture of Cartagena de Indias, that did not take place (1741). -

-
 Venetian ships (including the Bucentaur) at the feast of the Ascension, painting by Francesco Guardi, ca. 1775.
Venetian ships (including the Bucentaur) at the feast of the Ascension, painting by Francesco Guardi, ca. 1775. -
 Expedition of Jean-François de La Perouse, 1785–1788.
Expedition of Jean-François de La Perouse, 1785–1788. -
 Arrangement of a slave ship for the slave trade in 1788. The triangular trade crossing the Atlantic between Europe, Africa and America constituted the most important shipping routes at the time.
Arrangement of a slave ship for the slave trade in 1788. The triangular trade crossing the Atlantic between Europe, Africa and America constituted the most important shipping routes at the time. -
 The Descubierta and the Atrevida in the Philippine island of Samar, during the Malaspina expedition, 1789–1794.
The Descubierta and the Atrevida in the Philippine island of Samar, during the Malaspina expedition, 1789–1794. -
 Navigations of the Royal Philanthropic Vaccine Expedition, 1803–1814.
Navigations of the Royal Philanthropic Vaccine Expedition, 1803–1814. -
 The Fighting Temeraire tugged to her last berth to be broken up, by J. M. W. Turner, 1838.
The Fighting Temeraire tugged to her last berth to be broken up, by J. M. W. Turner, 1838. -
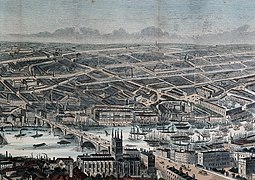 Active navigation on the Thames in the mid-19th century, in an engraving by Frederick James Smyth. Tall-masted ships crowd downstream, while barges and steamboats with smoking smokestacks are allowed to cross London Bridge.
Active navigation on the Thames in the mid-19th century, in an engraving by Frederick James Smyth. Tall-masted ships crowd downstream, while barges and steamboats with smoking smokestacks are allowed to cross London Bridge. -
 The "Ariel" and the "Taeping" contesting the Great Tea Race of 1866, depicted in a painting by Jack Spurling.
The "Ariel" and the "Taeping" contesting the Great Tea Race of 1866, depicted in a painting by Jack Spurling. -
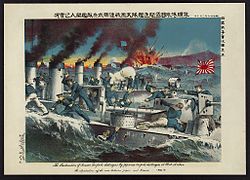 Naval engagement between Russian and Japanese destroyers at Port Arthur during the Russo-Japanese War, 1904.
Naval engagement between Russian and Japanese destroyers at Port Arthur during the Russo-Japanese War, 1904. -
 Amundsen expedition to the South Pole, 1913.
Amundsen expedition to the South Pole, 1913. -
![Sinking of an enemy ship by a German "U-boat" in 1917. In addition to submarine warfare, submersible vessels have had all sorts of uses, including mail,[14] the oceanography or polar exploration.[15]](//upload.wikimedia.org/wikipedia/commons/thumb/7/75/St%C3%B6wer_U-Boot_Truppentransporter.jpg/281px-St%C3%B6wer_U-Boot_Truppentransporter.jpg) Sinking of an enemy ship by a German "U-boat" in 1917. In addition to submarine warfare, submersible vessels have had all sorts of uses, including mail,[14] the oceanography or polar exploration.[15]
Sinking of an enemy ship by a German "U-boat" in 1917. In addition to submarine warfare, submersible vessels have had all sorts of uses, including mail,[14] the oceanography or polar exploration.[15] -
 The Operation Overlord (June 1944) was the largest naval operation in history, in a relatively small maritime environment (the English Channel).
The Operation Overlord (June 1944) was the largest naval operation in history, in a relatively small maritime environment (the English Channel). -
 The United States Fifth Fleet departs for Okinawa in March 1945, in the final stages of the War of the Pacific.
The United States Fifth Fleet departs for Okinawa in March 1945, in the final stages of the War of the Pacific.












![Sinking of an enemy ship by a German "U-boat" in 1917. In addition to submarine warfare, submersible vessels have had all sorts of uses, including mail,[14] the oceanography or polar exploration.[15]](/wiki/File:St%C3%B6wer_U-Boot_Truppentransporter.jpg)
-_D-day_6_June_1944_A24096.jpg)
_at_anchor_in_March_1945_(80-G-K-3813).jpg)
Contemporary shipping has massively ceased to perform one of its traditional functions and has been replaced by aviation, such as passenger transport, although with two important exceptions: leisure travel (tourism by cruise ships) and irregular traffic of people (irregular immigration). Since the Second Industrial Revolution, the main volume of freight transport has been hydrocarbons (oil tankers and gas tankers). Other raw materials are also transported in bulk on cargo ships, but from 1956 onward, a large part of goods of all kinds were adapted to standardized containers that speed up loading and unloading, allowing a combination with land transport (hub). Highly technological navigation has reduced crews and increased the size of ships. For example, in deep-sea fishing, which locates its prey with sophisticated means and lasts indefinitely in time — freezer ships or factory ships — which in some circumstances has made them vulnerable to new forms of piracy.
-
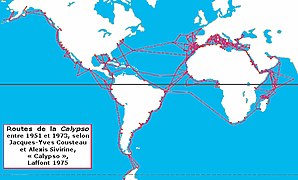 Routes of the Calypso, research ship of Commander Cousteau.
Routes of the Calypso, research ship of Commander Cousteau. -
 Cargo vessel using the appropriate facilities for container traffic (container cranes) at the port of Le Havre.
Cargo vessel using the appropriate facilities for container traffic (container cranes) at the port of Le Havre. -
 Boat overloaded with illegal immigrants, alongside a Spanish coast guard.
Boat overloaded with illegal immigrants, alongside a Spanish coast guard.




Methods and techniques[edit]
These are the methods used in maritime navigation to solve the three problems of the navigator:
- Determining and maintaining the "course".
- Determining the "time", the "speed" and "distance", for the duration of the voyage.
- Knowing the "depth" in which one is sailing so as not to run aground.
[edit]
Navigation and location of the ship by positioning techniques based on the observation of bearings and distances to notable points on the coast (lighthouses, capes, buoys, etc.) by visual means (pelorus), observation of horizontal angles (sextant) or electronic methods (bearings from radar to racons, transponders, etc.)
[edit]
Navigation and location of the ship by analytical means, after considering the following elements: initial location, bearing(s) — whether absolute bearings, surface bearings, or relative bearings. Also velocity as well as the external factors that have influenced the course either partially or entirely, such as the wind (leeway) and/or the current (bearing of the current and hourly current intensity). The point obtained from the calculations is called the "Dead reckoning location", with its corresponding latitude and longitude. This point is also known as Fantasy point.
[edit]

Navigation that follows a rhumb line — that is, all meridians are cut at the same angle. On a nautical chart following the Mercator projection, a loxodromic is represented by a straight line.
This type of navigation is useful for not too long distances, as it allows the course to remain steady,[16] but it does not offer the shortest distance.
[edit]
Navigation that follows the shortest distance between two points, i.e., that which follows a great circle. Such routes yield the shortest distance between two points on the globe.[16] To calculate the bearing and distance between two points it is necessary to solve a spherical triangle whose vertices are the origin, the destination, and the pole.[17]
[edit]
Navigation and location of the ship by geopositioning techniques based on the observation of the stars and other celestial bodies. The variables measured to find the location are: the observed angular height of the stars above the horizon, measured with the sextant (formerly with the astrolabe or other instrument), and the time, measured with the chronometer.
Conceptually, the process is not complex to understand:
- Knowing the time of the observation, and with the data contained in the nautical calendar, it is possible to determine the astronomical coordinates of the observed star.
- Knowing the coordinates of the observed star and the height above the horizon with which it was observed, we can deduce that the observer's position is located on a circle whose center is located at the geographical point directly below the star.
- Any observer located at any point on that circle will observe the star with the same height above the horizon.
- The observer can therefore know that his position is somewhere on this circle.
In practice, the mathematical process, called "reduction" of the observation, can be complex for the uninitiated. To the height observed with the sextant, it is necessary to apply a series of corrections to compensate for atmospheric refraction, parallax and other errors. Once this is done, it is necessary to solve a spherical triangle by mathematical and trigonometric methods.
There are many methods to do this. The manual methods use tables (trigonometric, logarithms, etc.) to facilitate the calculations. The introduction of calculators and electronic computers at the end of the 20th century greatly facilitated the calculation, but the creation of GPS made celestial navigation no longer important, relegating it to the background as an alternative method in case of failure of the on-board electronics or as a hobby of scientific interest.
[edit]
Navigation and location of the ship by positioning techniques based on the aids provided by global positioning systems, such as GPS, GLONASS, or GALILEO. It is the system most widely spread and easiest to use, in spite of the errors that may arise.
[edit]
Navigation and location of the ship by means of the analysis of the data provided by accelerometers and/or gyroscopes located on board, which integrate the accelerations experienced in complex electronic systems, that converted into velocities (in the 3 possible axes of displacement) and according to the observed courses, make it possible to obtain the location of the ship.
Iconography[edit]
The harbinger of a successful navigation was the dolphin, which is why its representation became the symbol carried by all ships.
More recently, navigation was represented as a woman crowned with ship's sterns whose clothes are agitated by the winds. She rests one hand on a rudder and the other holds the instrument for measuring height. At her feet, the ampoule, the compass, the trident of Neptune and the riches of commerce, while the sea can be seen on the horizon, completed by a lighthouse and traversed by ships at full sail.[10]
See also[edit]
Notes[edit]
- ^ More than a thousand "concave ships" arriving on the beaches of Troy, bad fortune of the navigator Ulysses and the expertise of the "Argonauts" — among whom is the builder of the ship that bears his name, Argus
- ^ Ships from Tyre supplied King Solomon with goods from distant places, including Tarshish — Tartessos — to the same destination a Phoenician ship was carrying Jonah, until the crew threw him into the sea when they blamed him for the storm that threatened to sink them.
References[edit]
- ^ Navigation: theory and practice of charting a course for a ship, aircraft or spaceship. Nautical: Relating to or involving ships or shipping or navigation or seamen. Naval: (nautical) Of or relating to ships in general.
- ^ "15.1 The Earliest Ships and Sailors — The Outline of History by H. G. Wells". outline-of-history.mindvessel.net. Retrieved 2023-01-20.
- ^ "New Perspectives on Phoenician Sailing". www.metmuseum.org. Retrieved 2023-01-20.
- ^ "The Rome 101 blog". Archived from the original on 20 November 2016. Retrieved 19 November 2016.
- ^ Pirenne, Henri (1922). "Mahomet et Charlemagne". Revue belge de philologie et d'histoire. 1: 77–86. doi:10.3406/rbph.1922.6157.
- ^ Venetian navy
- ^ Genoese navy
- ^ Salabert, Vicente (1970–1971). "La expansión catalano-aragonesa por el Mediterráneo en el siglo XIV". Anuario de Estudios Medievales (in Spanish) (7). ISSN 0066-5061.
- ^ Picatoste, Felipe (1891). Apuntes para una biblioteca científica española del Siglo XVI: estudios biográficos y bibliográficos de ciencias exactas físicas y naturales y sus inmediatas aplicaciones en dicho siglo (in Spanish).
- ^ a b Diccionario enciclopédico popular ilustrado Salvat (1906-1914)
- ^ Cipolla, Carlo Maria, Cañones y velas en la primera fase de la expansión europea, 1967.
- ^ Fernand Braudel, Immanuel Wallenstein.
- ^ "Red Digital de Colecciones de Museos de España - Museos". ceres.mcu.es (in Spanish). Retrieved 2023-01-19.
- ^ "Correo submarino - Marinos Mercantes". www.webmar.com. Retrieved 2023-01-19.
- ^ "Rusia planta su bandera en el Ártico" (in Spanish). 2007-08-02. Retrieved 2023-01-19.
- ^ a b Weintrit, Adam; Neumann, Tomasz (7 June 2011). Methods and Algorithms in Navigation: Marine Navigation and Safety of Sea Transportation. CRC Press. pp. 139–. ISBN 978-0-415-69114-7.
- ^ "Navisfera de Wilson". 2009-04-22. Archived from the original on 2009-04-22. Retrieved 2023-01-24.
External links[edit]
- Historia de la navegación astronómica (in Spanish)
- Amigos de la tradición náutica argentina (in Spanish)
- Esfera armilar, aplicada em navegação (in Portuguese)
